Abstract
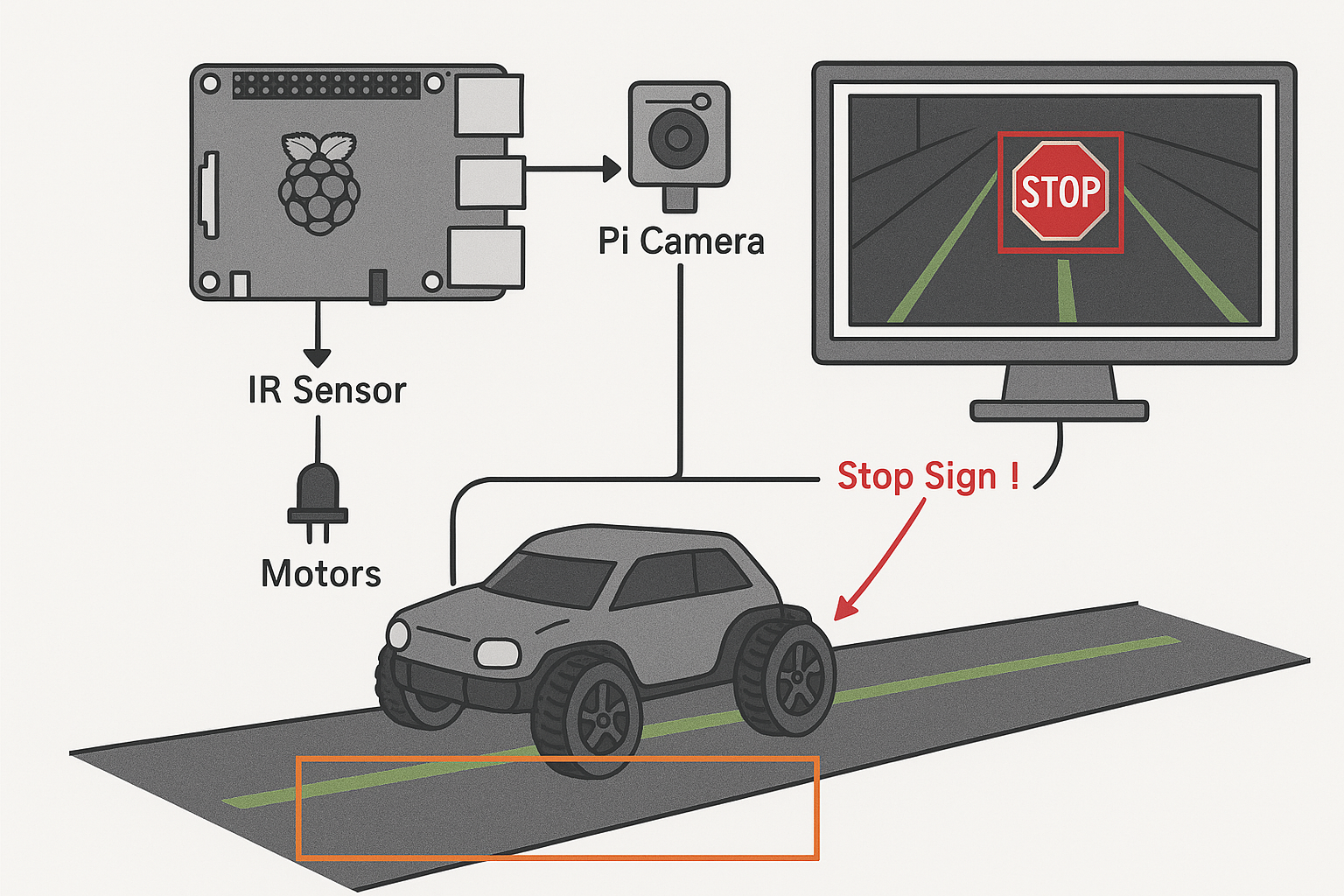
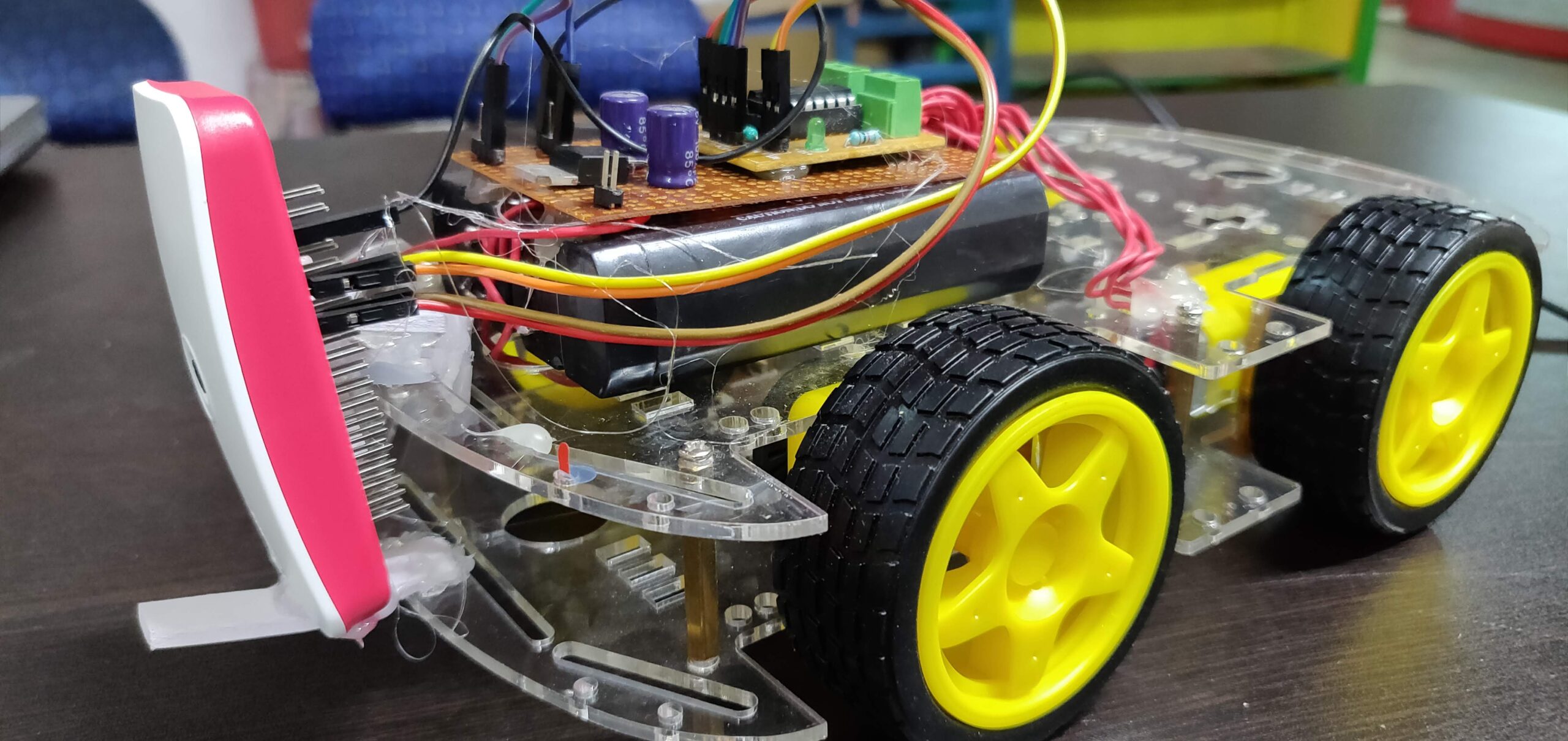
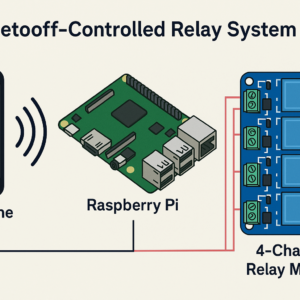
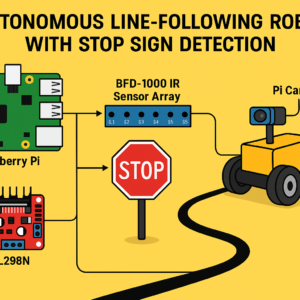
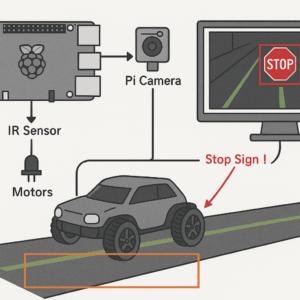
This project presents the design and implementation of an autonomous robotic vehicle utilizing a Raspberry Pi, camera vision, and IR sensor technology for intelligent navigation. The system is programmed to detect lane lines using computer vision techniques and identify obstacles and stop signs through real-time image processing. A PiCamera mounted on the vehicle captures continuous video feed, which is analyzed using OpenCV and a pre-trained Haar Cascade classifier for stop sign recognition. An IR sensor aids in obstacle detection, ensuring safe maneuvering. The motor controls are managed using GPIO interfacing to navigate the vehicle accordingly—forward, left, right, or stop. This project demonstrates the fusion of image processing and embedded control for smart mobility solutions, paving the way for scalable applications in robotics and self-driving vehicle research.
Reviews
There are no reviews yet.