
Abstract:
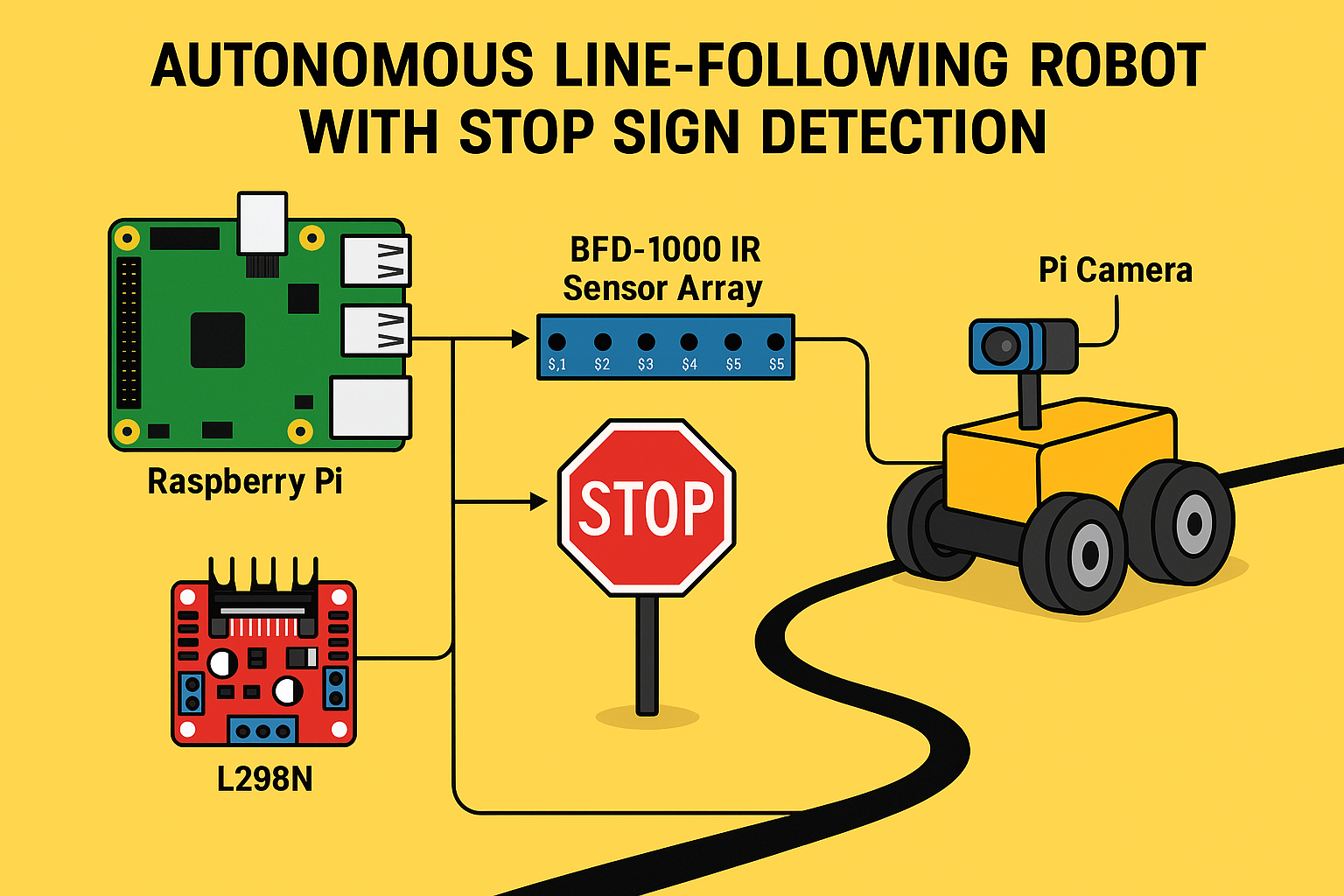
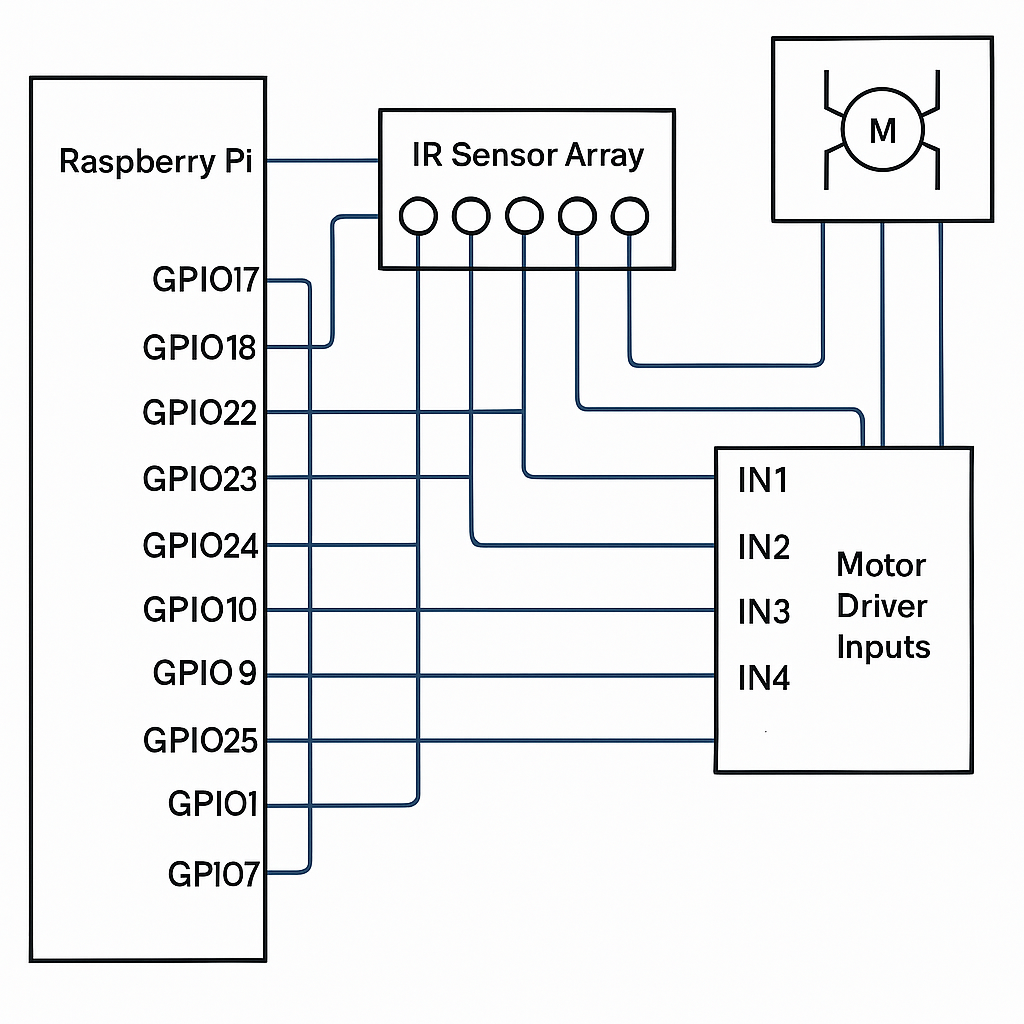
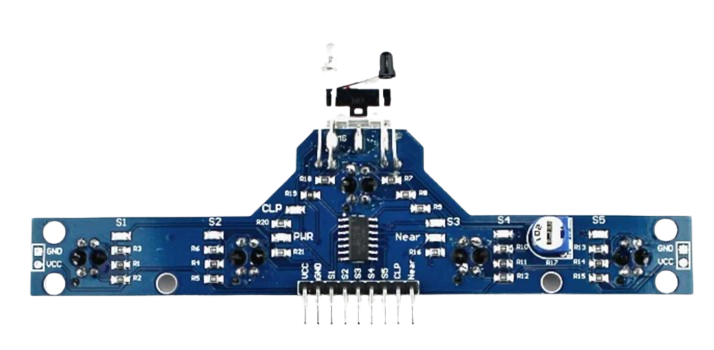
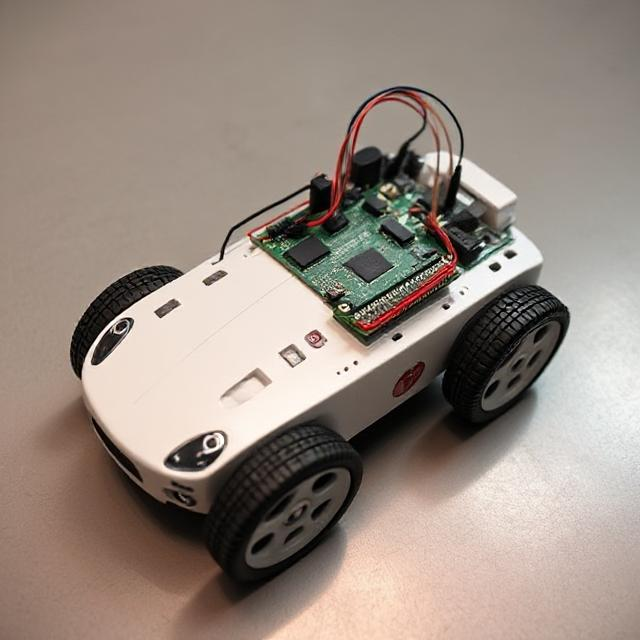
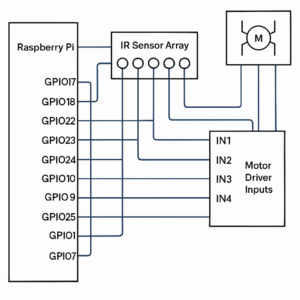
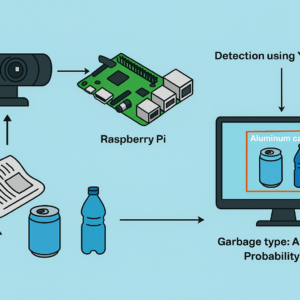
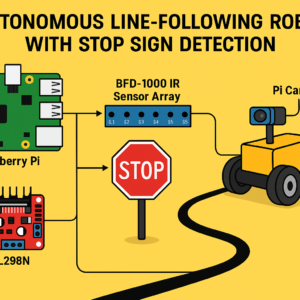
This project presents a smart autonomous robotic vehicle system using a Raspberry Pi, leveraging real-time image processing and an IR sensor array for navigation. The system integrates the PiCamera for visual input and uses OpenCV for detecting road signs—specifically, stop signs—while a BFD-1000 IR sensor array is utilized to follow road lines and ensure accurate path tracking. The vehicle is also equipped with collision and obstacle detection sensors to prevent crashes, making it capable of smart navigation in dynamic environments. The implementation showcases a cost-effective, versatile solution for autonomous mobility with potential applications in robotics education, prototype delivery systems, and AI-based mobility research.

Reviews
There are no reviews yet.